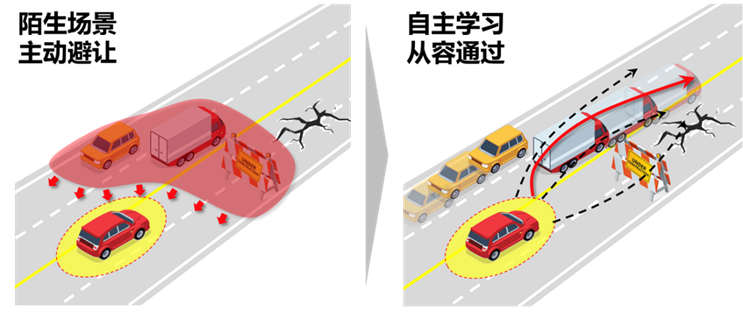
中國汽車工程學會會士楊殿閣教授團隊提出自動駕駛可信持續進化技術,有望突破自動駕駛長尾問題
近日,中國汽車工程學會會士、清華大學車輛與運載學院楊殿閣教授團隊提出了自動駕駛“可信持續進化”技術,該技術有望突破自動駕駛“長尾難題”,解決公眾對于無人駕駛大規模商用安全性的擔憂。
安全性是自動駕駛技術最核心的命題,盡管目前自動駕駛汽車已經具備了在一些特定典型場景中示范無人駕駛運行的能力,但不斷出現的自動駕駛汽車事故仍舊使公眾對于無人駕駛大規模商用的可能性產生質疑。開展更多的自動駕駛測試和示范終究無法完全消除這一疑慮,真正突破這一瓶頸需要自動駕駛汽車在設計時就能保證面對突發情況時,即使沒有預先設定的應對方案,仍然是可通行的并且是安全的。
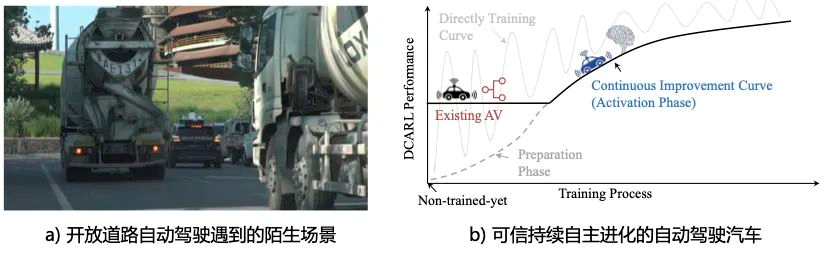
領先的自動駕駛企業解決這一問題思路目前大多采用大數據+AI訓練的方案,通過采集更大規模的駕駛數據、測試更長的駕駛里程來覆蓋所有可能的駕駛場景,在有安全員監控的情況下讓汽車變得越來越“聰明”。然而,真實世界總是有可能存在一個AI模型從來沒有見過的場景,在這些場景中AI的表現是未知的,而只要這種可能性存在,那么無人駕駛汽車將一直處于測試與迭代開發階段,難以真正讓安全員下車進行大規模商用,這也造成了目前公認的長尾難題。
為解決這一問題,清華大學車輛學院研究團隊提出了自動駕駛“可信持續進化”技術,該技術會在自動駕駛汽車行駛初期將所有場景無差別地看成未知場景,均采取主動避讓的基礎駕駛策略以保證安全性;在此基礎上,AI模型將從大數據中主動尋找熟悉的行駛場景,并自主地將在這些場景中的駕駛性能從基礎策略調整到更優水平。因而能從系統設計的角度,解決長尾場景難以窮盡的問題,保證在任意場景下不依賴預先設定的“可信持續進化”。實現這樣一個技術最核心的難點在于進化的過程要保證性能是單調提升的,這樣才能使得整個進化過程仍具備最基礎的安全性,但經典的AI訓練過程中性能可能會時好時壞,不受控制,帶來新的風險,而研究團隊設計的通過動態評估置信度進行AI模型訓練的方案,能夠使性能隨數據的增加而持續變好,因而能夠很好地滿足這一要求。
自動場景可持續進化效果
這項技術能夠讓自動駕駛汽車在一開始就不再需要安全員,最開始的駕駛行為會像一個新手司機一樣,經常避讓周圍的物體。而在更長時間的行駛之后,車輛會利用數據讓自己學習得更聰明,更加游刃有余地應對道路上的各種場景,與此同時,在遇到一個完全陌生的場景時,仍然會主動避讓來保證安全。這一技術有望讓無人駕駛從典型場景示范走向開放道路實際應用,讓無人駕駛汽車具備實現普及和大規模商用的可能性。
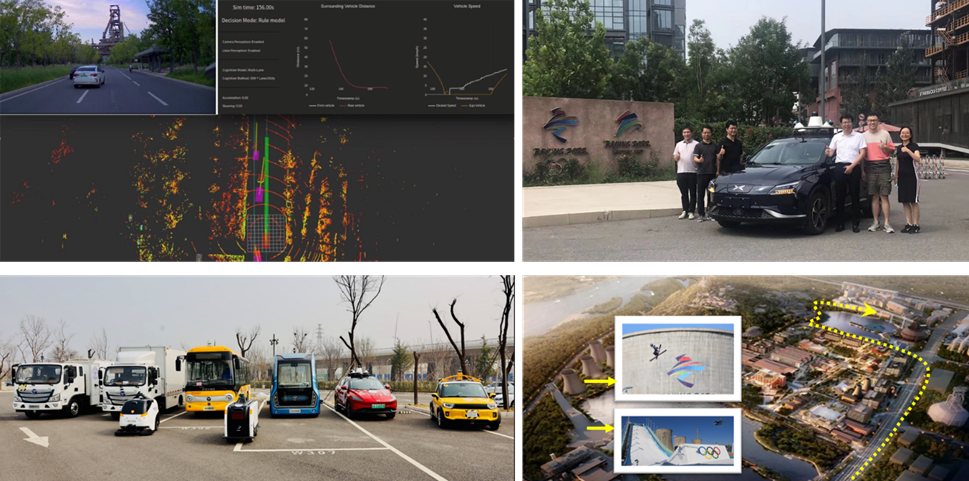
科技冬奧自動駕駛示范應用
該技術在2022北京科技冬奧自動駕駛示范項目中成功得到了應用。研究團隊正在與國內外領軍汽車企業和知名的出行廠商合作開展商業化合作,進一步開展大規模無人駕駛開放道路應用示范,以檢驗該技術在更多行駛場景中的應對能力與自主提升能力,并持續收集無人駕駛測試數據,以滿足開放道路無人駕駛可信賴性要求。
研究結果發表在Nature Machine Intelligence上。論文第一作者為中國汽車工程學會青托人才、清華大學曹重博士;通訊作者為楊殿閣教授;青托人才、清華大學江昆博士;美國密歇根大學彭暉教授共同參與了本研究工作。
論文鏈接:
- 大家都在看